Microrobotic
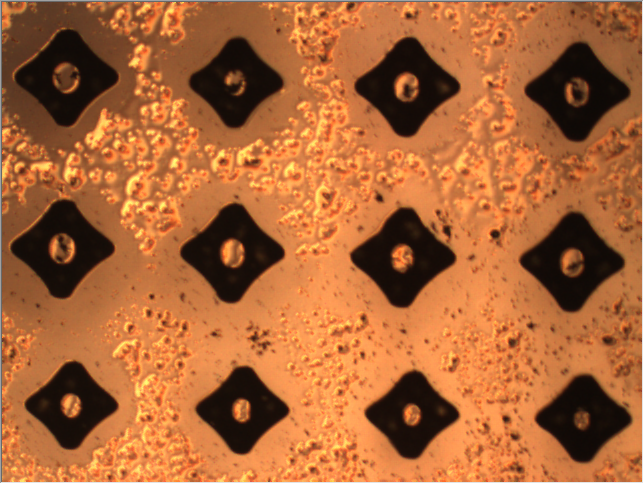
Organ transplantation have since it started been on high demand, but due to lack of supply of organs and alternate solutions, such as artificial organs or man-made organs that can replace the organs naturally, have become a necessarily. This sub team focuses on the production of hydrogel scaffolds with magnetic particles that may increase the chance of being able to create artificial organs. Since Microrobots can be position in specific shapes and patterns, they can potentially form artificial organs. The hydrogels will be control using magnetism or light, through manipulation of current in designed electromagnets, or the heat generated by the laser light, allowing it to move in all 3-dimension. Additionally, the cells must endure the ability to self-sufficient through the absorption of light or any form of energy.
For this project, I was the leader who was responsible of managing and designs the experiments. After the experiment is performed, our group will analysis the result and designs the new experiment to further improves of Microrobotic. Our Goal is to create a simple Microrobot that can help structuring cells into other shape. This will allow cells to form into artificial organ that can be use in organ transplantation operations.